Die Räder sind Räder für eine Scheibtruhe (Schubkarren).
Projekt - SEGI
Bau eines Segway(c) Clone:
|
|
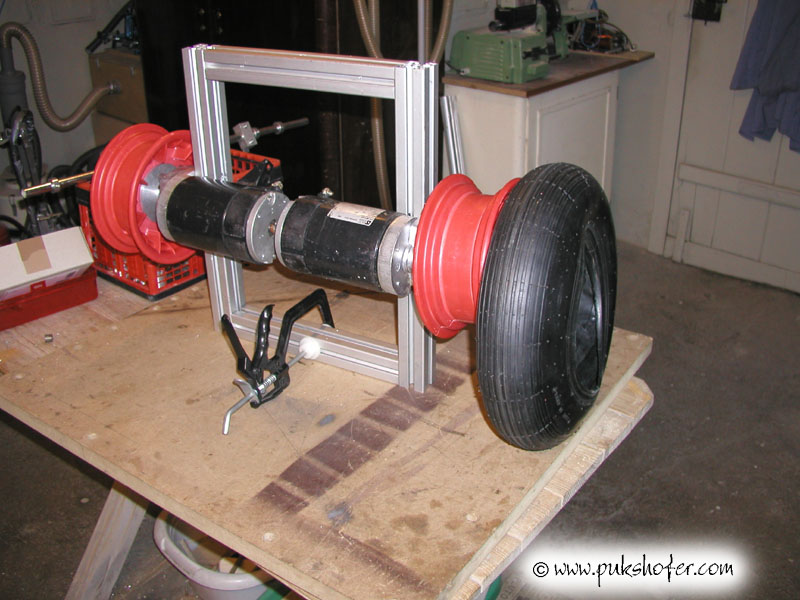
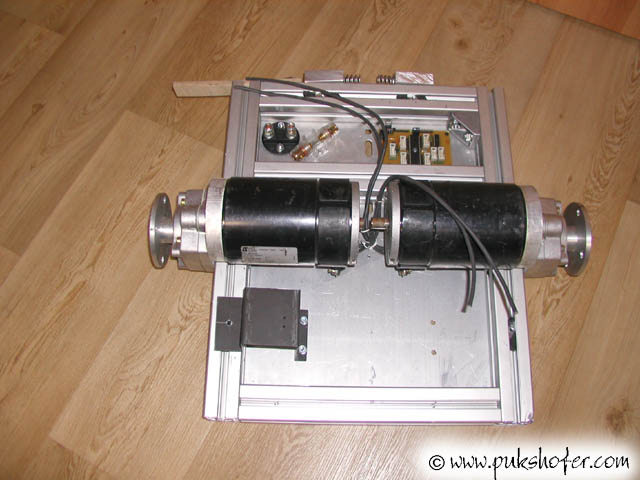
Erster Versuch mit einem Rahmen
aus Bosch-Profilen und Räder vom Baumarkt. Die Räder sind Räder für eine Scheibtruhe (Schubkarren).
Ich wollte hier eine durchgehende Welle
verwenden, die es auch als Zubehör im Baumarkt gibt.
|
|
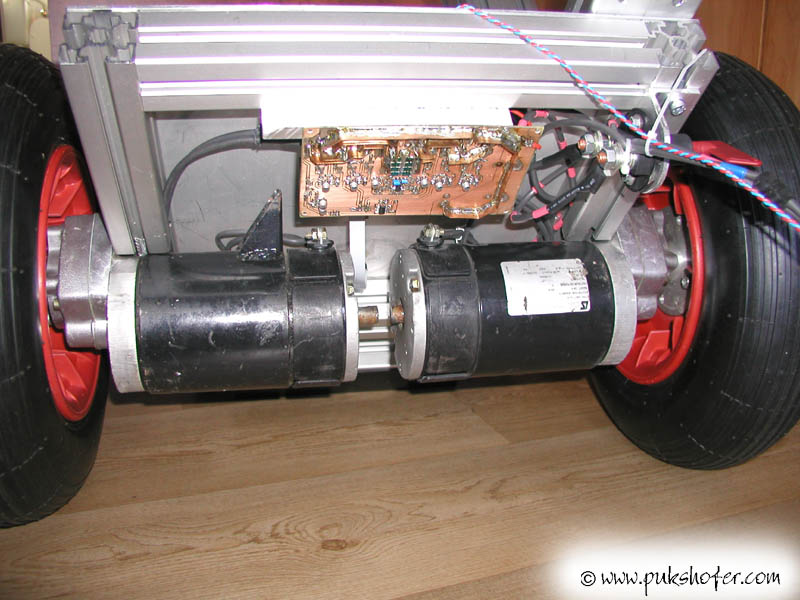
Die obige Idee habe ich aber schnell verworfen, weil für eine Untersetzung von 1:10 hätte ich ein zu großes Ritzel benötigt.
Diese Version bekommt daher zwei Getriebemotoren. (a'
800 Watt ) |
 |
 |
Für die Montage der Räder, werde ich mir zwei Flansche drehen. Dafür musste ich die Felgen innen ausdrehen. |
| Gedreht hatte ich den Flansch aus einer Keilriehmenscheibe. |
 |

|
Felge und Flansch. |
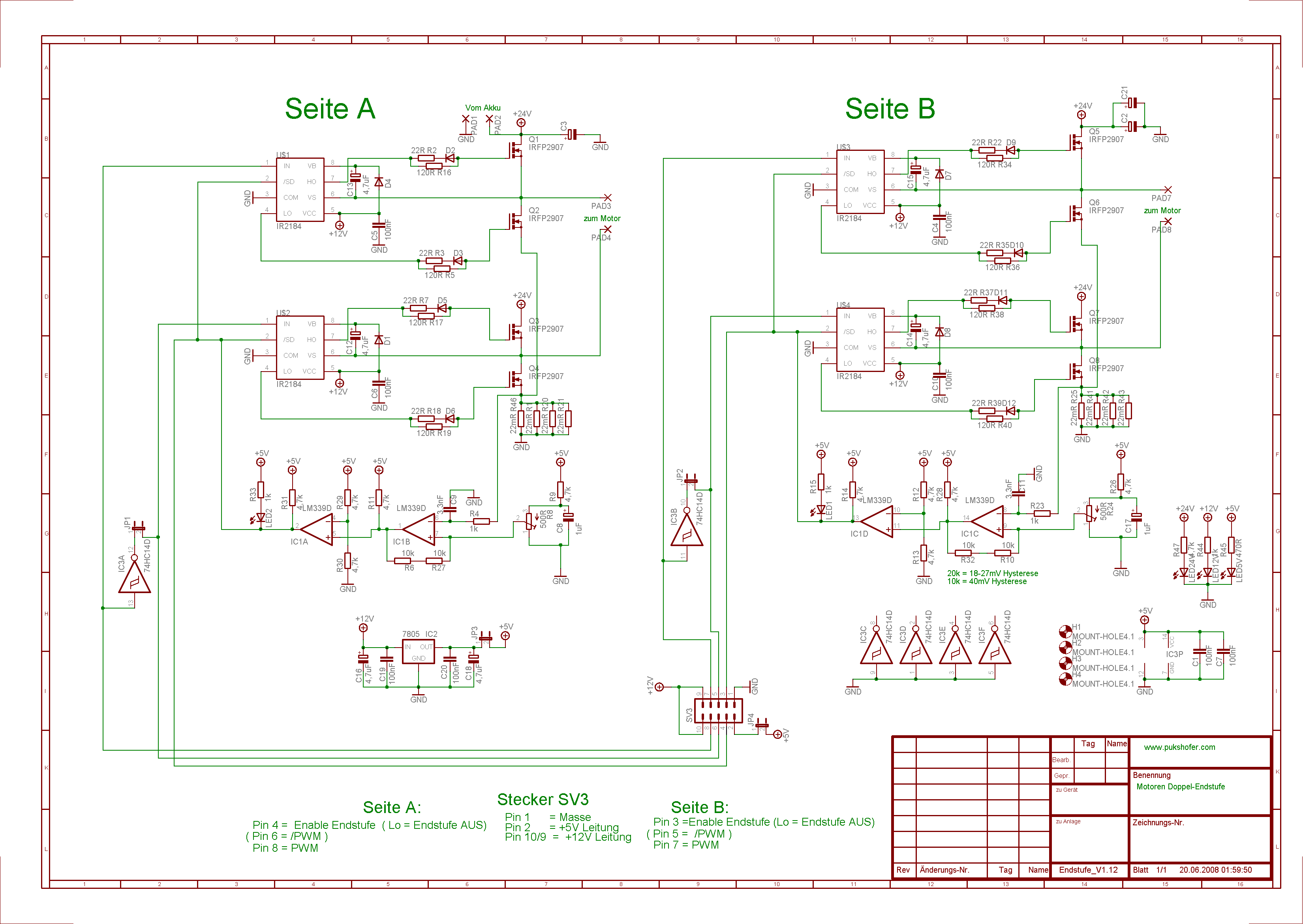 |
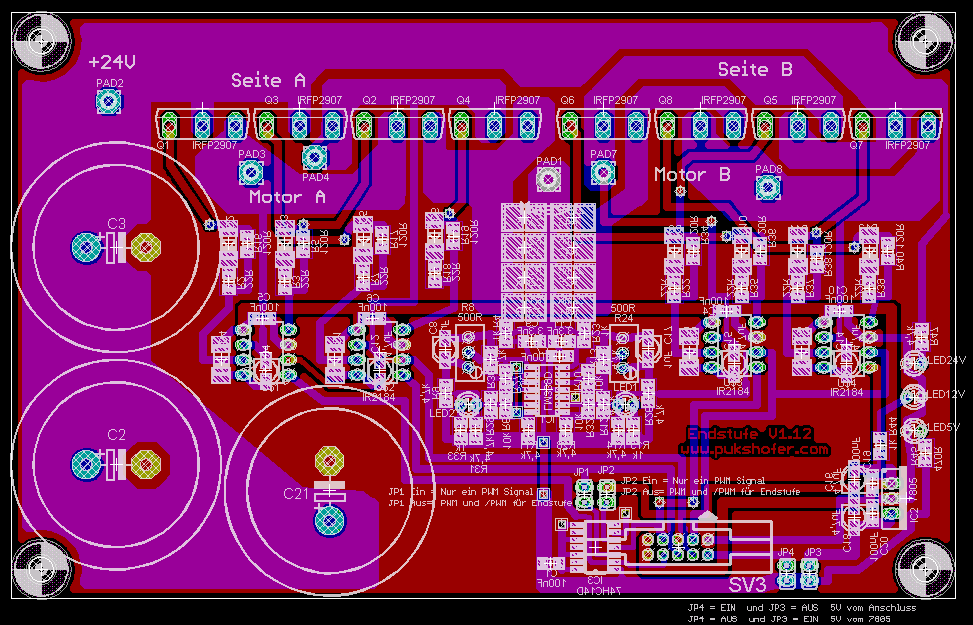
Hier der Schaltplan für den Prototyp |
|
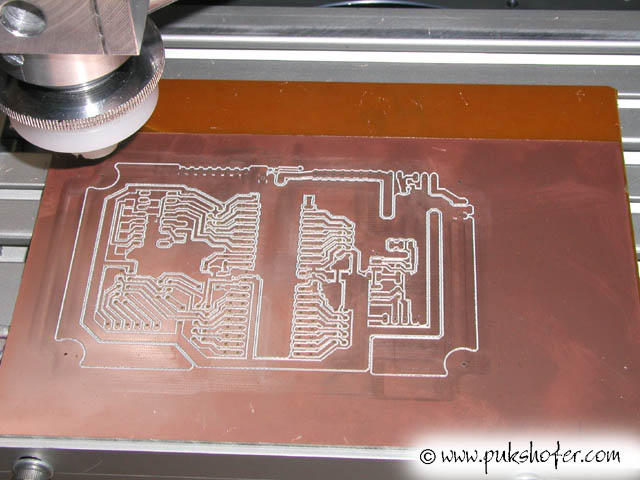
Layout doppelseitig
|
 |
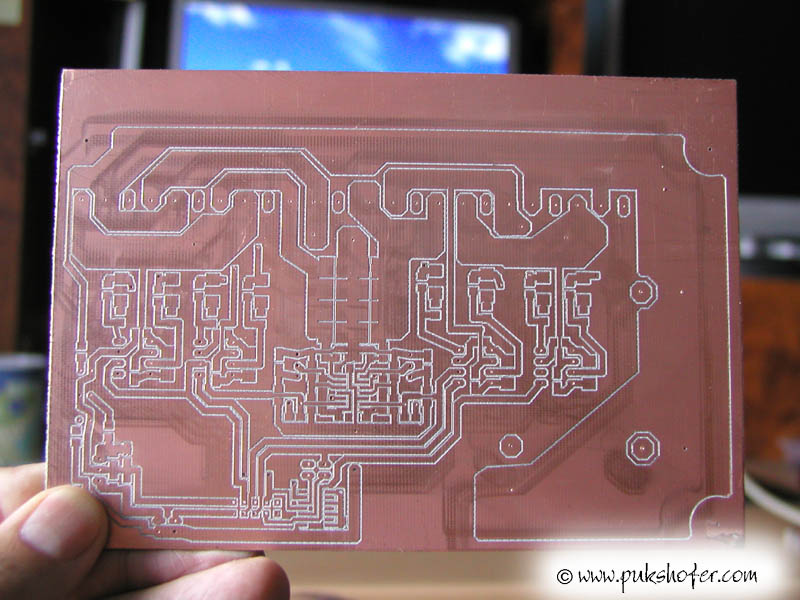 |
Platine Isoliergefräst |
|
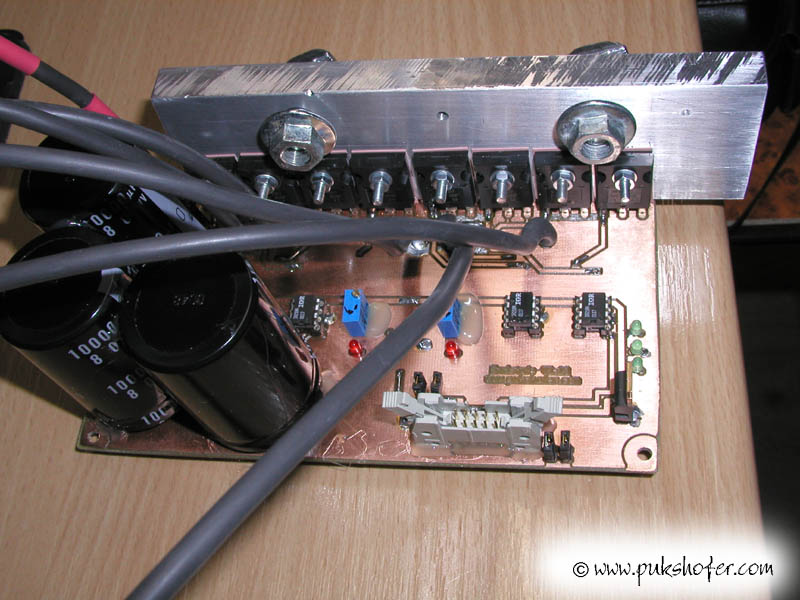
Bestückungsseite |
 |
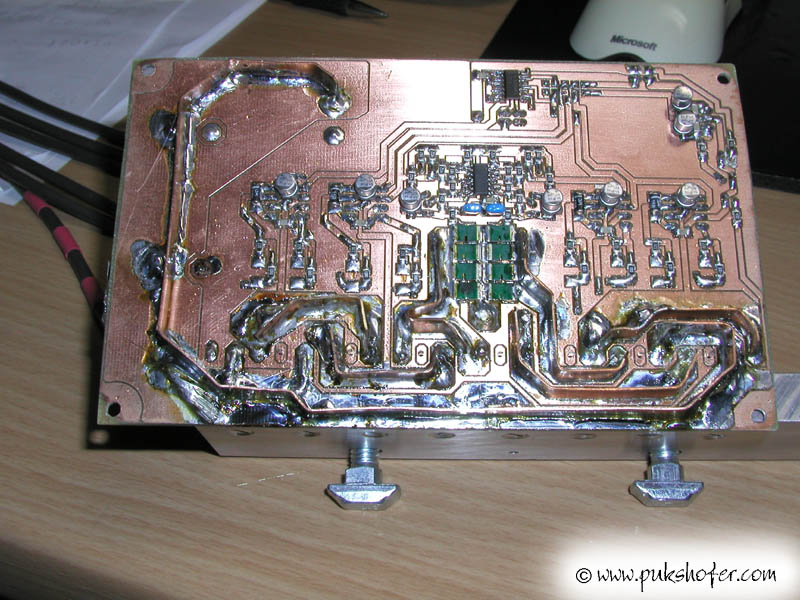 |
Rückseite in SMD Hoch-Ampere-Leiterbahnen wurden zusätzlich mit Kupferblech verstärkt. |
|
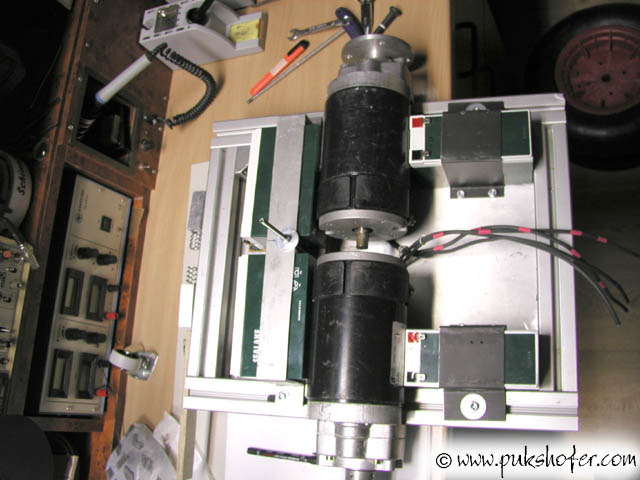
Erster Einbau. (Prototyp) Rechts
sieht man den Netztunterbrecher aus dem KFZ-Handel. Mit dem unterbricht man
normal die Batterieleitung im Auto.
|
 |
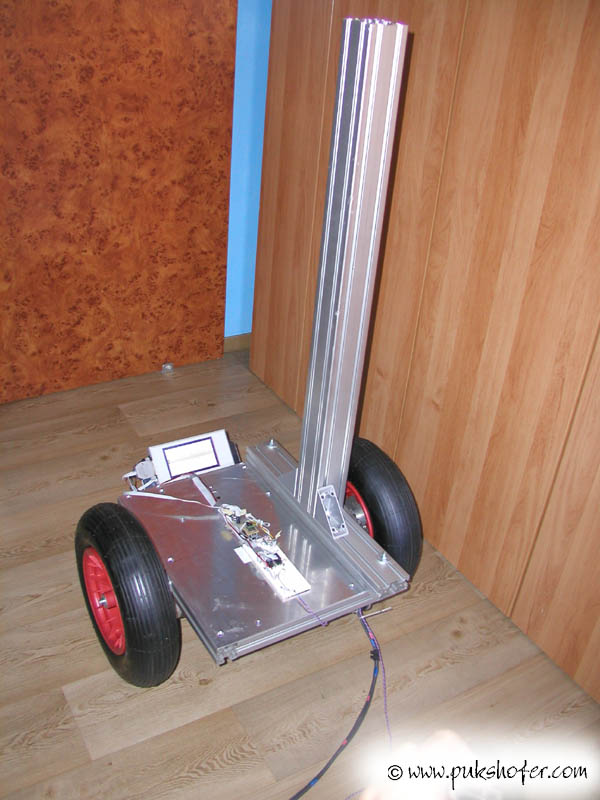 |
Erster erfolgreicher balancier Versuch :-) Zum testen habe ich ein Aluprofil mit 1m Länge und 80*80mm dicke montiert. Als Kontroller habe ich mein Grafik-LCD-Modul mit einem Mega32 verwendet. Damit kann ich auch einfach, Werte zur Kontrolle ausgeben. Der SEGI hängt auch noch an der Leine (Stromversorgung), damit ich nicht immer die Akkus laden muss.
|
|
Sodaaaa..... |
 |
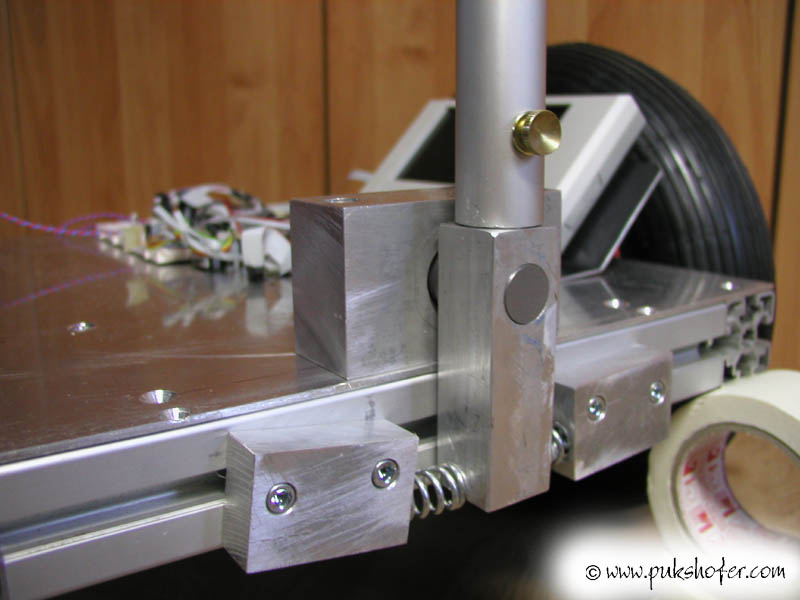 |
Das große Problem war die Rückführung der Lenkstange. Ich hatte es zuerst mit einem Gummipuffer auf der Welle probiert. (So, dass sich der Gummipuffer verdrehen muss.) Die Haltekraft in der Mittelposition war aber zu gering. Jetzt habe ich mich mit zwei starken Federn beholfen, die ich unter der Achse gegen die Lenkstange drücken lasse. Habe so auch gleichzeitig einen Anschlag. Den
senkrechten Alublock habe ich oben ca. 7cm lang abgedreht. |
|
Auf der Rückseite der 20mm Welle habe ich ein Loch für ein Poti reingebohrt. Das Poti wird mit einer kleinen Adapterplatte befestigt. |
 |
 |
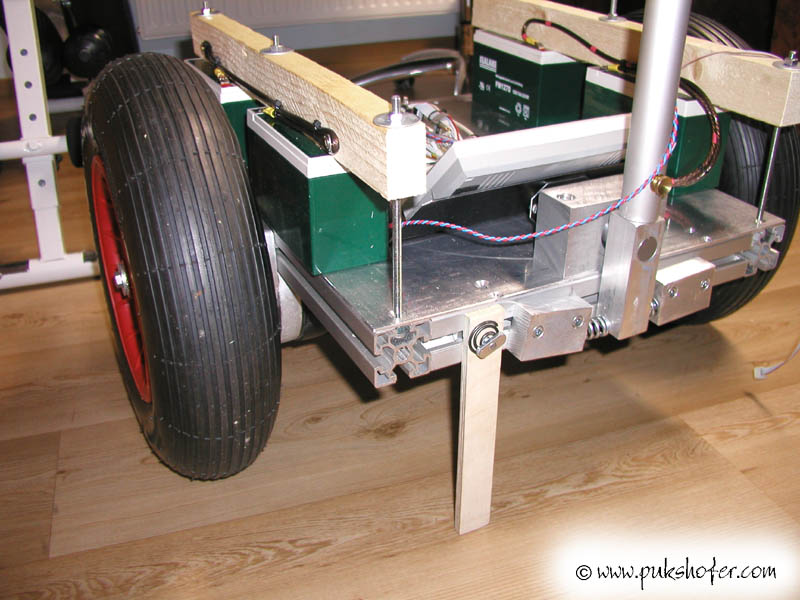
Provisorische Montage von vier Bleigel-Akku's. Je 12V und 7Ah, Typ FM1270 Ergeben : 24V / 14Ah Jetzt ist der SEGI endlich ohne
Leine. |
|
Und die neueste Errungenschaft, ein SEGI-Ständer aus Holz
;-) |
 |
Und weiter geht es mit dem Projekt:
Es steht ein großer Umbau an:
Die Akkus sollen nach unten, Sensoren nach unten, Steckbrett weg,
Grafik-LCD-Modul weg
und dafür eine neue Prozessorpaltine mit Mega32 und ein I2C-Lcd an den Lenker.
 |
Großes Aufräumen: Haupt-EIN/AUS Schalter kommt jetzt nach rechts vorne oben. Dazu eine 50Ampere Sicherung aus dem Auto-Hifi-Berreich und eine neue Universal_Mega32-Platine, die jetzt den SEGI steuern wird. |
|
Die Universal_Mega32-Platine habe ich dafür neu
entwickelt. |
 |
 |
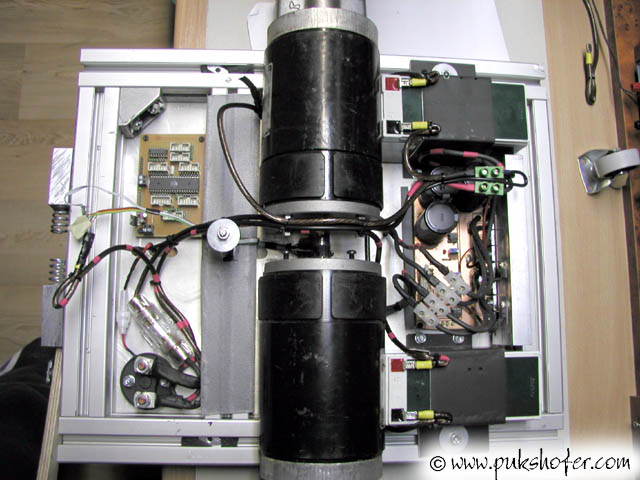
Hier die neue Platzierung der Akkus. |
| Und mit Endstufe. Die Endstufe wird dann noch neu gemacht, weil ein paar Gatter noch raufkommen, die vorher am Steckbrett waren.. |
 |
|
|
Die derzeitige Verkabelung. Upps....Das mittlere Kabel mit dem Silikonschlauch hängt nur zufällig da ins Bild..... Das ist die RS232-Leitung ;-) |
| Hier das Lenker-Terminal zum einstellen und
abrufen von Werten. ( 3Zeilen mit je 12 Zeichen) Darunter (blauer Knopf) ist der Joystick der von einem PC-Joystick ausgebaut wurde.
|
 |
 |
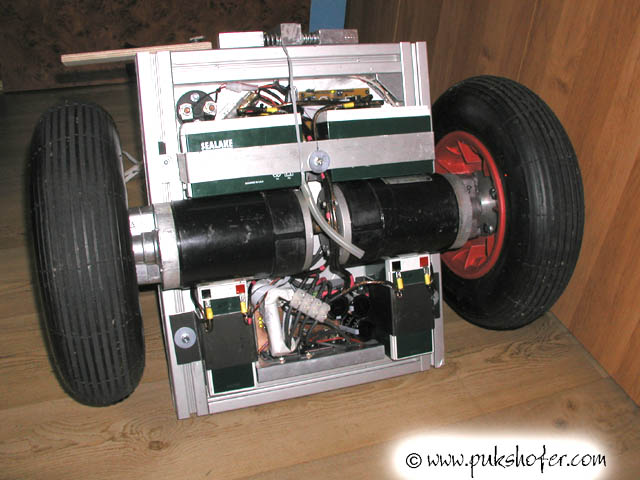
Nun sind alle Akkus auf der Unterseite und auch der Gyro und
der ADXL. Rechts oben beim Lenker sieht man den Aktivierungshebel. (Bremslenker von einem Fahrrad) Mit diesem aktiviere und deaktiviere ich die Motoren. Ich hatte das in der Testphase so gehandhabt, dass ich am Lenker einen Taster hatte, mit dem ich schnell die Motoren ausschalten konnte, falls mal der SEGI ausbricht. Das geht dann schneller, als wenn der Taster in der Grundfläche sitzt (wie beim originalen Segway(c) ) und man vorher runtersteigen muss, damit die Motoren aus sind. Ich hatte auch keine passende Lösung gefunden, einen Taster in die Grundplatte zu integrieren. Dieser sollte dann ja auch Wasser und Staubfest sein... Heute bin ich das erste Mal im Freien gefahren :-)
Ein kleines Video das der Nachbar aufgenommen hat:
|
|
März 2009
Nach 3 Jahren Studium an der WIFI - Graz, habe ich
jetzt meine Meisterprüfung mit Auszeichnung bestanden. Mechatroniker für Elektronik, Büro- und EDV-Systemtechnik
|
 |
Das ist jetzt der letzte Stand vom SEGI-Projekt Inzwischen sind noch Kotflügel dazugekommen und eine Beleuchtung. Vorne befinden sich auch jeder Seite 3 Power Led's mit je 1Watt (ergibt ein LED-Licht von 6 Watt ) Auf der Rückseite sind je Seite, 4 normale rote Led's angebracht. Angesteuert werden die Led's mit zwei Konstantstromquellen die als Step-Down Schaltregler mit dem MC34063, ausgelegt sind. Eingeschalten werden die Led's über das Lenker-Terminal per Joystick.
|
|
Perspektive von unten |
 |
|
|
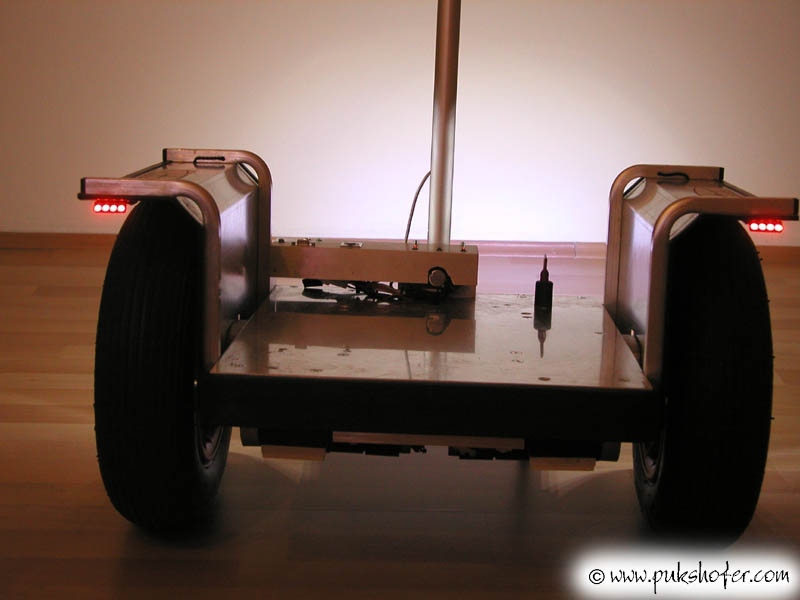
Die Rückseite mit je 4 Led's pro Seite.
|
Die reinen Materialkosten, für den fertigen SEGI, belaufen sich auf ca. € 1000,- Nicht dazugerechnet ist die Entwicklung, Prototypenbau und die Arbeitszeit. Endstufe, Prozessorplatine und Konstantstromquelle wurden 3mal aufgebaut. (erster Aufbau für Prototyp, zweiter Aufbau für Vortest, dritter Aufbau für Prüfung) Technische Daten:
Bevor Anfragen kommen: Grund: * Schnellladegerät ( Vollladung in ca.1-2Stunden) * externe Stromversorgung des Segway's . z.B. mit externen
Akkus, Brennstoffzellen oder speziellen Notstromaggregaten |
letzte Änderung: 07.10.2010
Zähler: